キャチロボ2022を振り返る-キャチロボ1ヶ月チャレンジの実態
この記事は、 大阪工業大学 Advent Calendar 2022の10日目の記事です。
皆さんこんにちは。あるみめんべい(療養中)です。
めちゃくちゃ私情ですが先日東京に行って見事コロナを持って帰ってきました。
観察期間明け早々中間テストがあるらしくて、最大4回分授業を欠席しているのにどう立ち向かえばいいのかわかりません。助けてください。これがクォーター制の良くないところです。梅田キャンパスの皆さん、共に頑張りましょう。
では、本題に入ります。
ロボコン界隈の皆様は、こんなハッシュタグを見たことがあるかもしれません。非常に不愉快でしたよね。
3日目
— あるみめんべい (@Alumi_menbei) 2022年8月20日
ちょっとぐーたらしすぎてました
夜中の設計が多分1番作業効率いい気がします 病気かな?
#キャチロボ1ヶ月チャレンジ#キャチロボ pic.twitter.com/Kmi0kGAfJg
(なんか1日目のツイート見つけきらんかったです)
「キャチロボ1ヶ月チャレンジ」とはその名前の通り、
「1ヶ月で機体を作ろう」というものです。
そんな無茶な、と誰もが思うでしょう。しかもこのハッシュタグをつけたツイートは全てじゃがりこを購入したとか、食べたとかそういうものばかりです。
それもそのはず、なぜか僕は気にし過ぎて情報統制を自分にかけていました。某PJみたいですね。
今回ブログなんで、経緯から技術?的なことまで書いていこうと思います。
技術だけ見たい、めんべいの裏話見たい、という人のために目次にしてますので見たいとこだけ見てください。
あっ、大工大ACの皆様にキャチロボについて軽くご紹介させていただきます。
キャチロボバトルコンテストは、京都工芸繊維大学・ロボコン挑戦プロジェクト、 立命館大学・ロボット技術研究会、大阪大学・Robohan、同志社大学・ロボット研究会、大分大学・ROUTE、京都大学・京大機械研究会が実行委員となり、全く新しいコンセプトで開催される「ロボットコンテスト」です。
大学生・高専生の技術レベル向上の支援、本気で「ものづくり」に取組む姿勢を応援する目的で創設された大会です。課題のクリアを通してマテリアルハンドリングの技術を学び、大会後に、技術的なアドバイスを受けることができます。この大会を通じて、参加者の技術レベル向上を図ります。
近年、産業界における機械化の進展は目まぐるしく、これまで人の手でしかできなかったことの多くが機械化・ロボット化されてきました。本コンテストでは、『機械は人間の手を超えられるか?』をメインテーマに、産業機械において重要なハンドリング技術を競っていただきます。
いかに速く、精確に、効率よくワークを運べるか…皆さんの技術とアイデアでこの課題に挑戦して下さい。
引用:キャチロボバトルコンテスト ホームページより
2022年度のルールは、「Catch the じゃがりこ」でした!実際の競技はこちら↓
(11試合目はよくみたら本日20時にプレミア公開みたいですね、なんか偶然。相手チームの方のロボットがよきよきだったのでよかったらみてください。来年は妨害機構もつけます!!!!
逆襲の肉抜きさんといい日本直流電源協会さんといいロボットでけえええゴツいいいかっけえええと思ってました。初期装備でラスボスに立ち向かう感じ。)
1.キャチロボ2022に出場することを決めた経緯
出場を決めたのは5月初旬。NHK学生ロボットコンテストの2次審査ビデオが提出できず、どうにかならなかったと後悔しつつも容赦なくレスコンに向けての活動を始めなくてはならない、といった時期でした。
レスキューロボットコンテストは競技というよりは審査会のようなもので、相手と争うとかではなく、コンセプトに沿った動きができるかどうかが求められる大会です。しかし僕は血の気が多いので誰かをぶっ倒したくて仕方がありませんでした。
そこで、当時のロボットプロジェクトの副リーダー(あ、言うの忘れてた僕はロボプロ22年度のリーダーでした。ロボットプロジェクトというのは大宮キャンパスにある学生プロジェクトのひとつです)に「...キャチロボ、出よ」と誘いました。
「キャチロボ」の存在は21年の時から知っていました。ロボプロ21年度の新入生大会として設定しようとした過去もあります。(結局当時の方針により却下されました。もうプロジェクトのことは思い出したくないので以降は軽く流します)
大会出場は僕と副リーダーの「個人出場」。色々問題になるのでロボプロ名義では出場できません。それは、ロボットプロジェクトが「学ロボ」と「レスコン」に出場するために大学から出資を得ている団体だからです。
余談ですがプロジェクト全体で新入生大会が19-21年度の代(今の2回生-4回生)まで実施されなかったのはプロジェクト教員の意向のようなものです。部活と同様指導教員は存在していて、当時の教員が頑なに新入生大会をよしとしませんでした。それには予算振り分け、費用対効果がない、などありますが一番は「新入生大会まで1年生と上級生間の関わりが薄まる、または当時参加していたコンテストは次の年の1月までまたぐもののため、学ロボのメインシーズンと被ってしまい作業が疎かになる」ということだそうです。
しかしそのおかげで弊プロジェクトにはロボコンに1度も挑戦することないまま、ましてやロボットひとつ完成させたこともないまま執行代となり、訳もわからず引退していくというわけです。今は2022年度の僕たちの代の悲惨さが功を奏したのか改善されつつあります。
もしロボプロ目当てに大学選びしてる高校生は安心して来てください。組織体制はともかく、めちゃくちゃいい設備が揃ってるので。
学ロボより機体サイズは小さいものの、求められるのは「正確性」「安定性」。そして他チームを押し退け決勝に上り詰めるための「アイデア性」...。
そして50万の賞金と絶対に貰える3万円の参加賞。
そんなん、やるしかないじゃん。自費でもな!!!!!!!!!
副リーダーは金にがめついので賞金で釣ることができました。エントリーシートを出した時、設計は副リーダー、僕は制御担当と役割を決めました。僕は学ロボが終わって以降もレスキューロボットコンテストの機体担当を持っていて、副リーダーもそれは同じでしたが僕の担当機体が不調を起こしたことで1台作り直しを計画することになり、キャチロボまで設計を担当することはできなかったからです。副リーダー担当の機体はその時は問題がなかったので同じマシン設計を主とする彼に設計をお願いしました。
あと、チーム名の由来はジョジョが二人とも好きなのでプッチ神父の
「全ての『始まり』に...『重力』があった」
「人の出会いとは『重力』であり、出会うべくして出会うものだからだッ!」
引用:ジョジョの奇妙な冒険 第6部 ストーンオーシャン
というセリフから、『重力』=『運命』
もう学ロボの時のように後悔はしたくない、絶対に勝ち抜いてみせる、という意味でめちゃくちゃになったロボプロ生活から
『逆らって何のしがらみもなくロボットを作る』=『逆らう』
ねこが好きなのでANNEX周りによくいたねこから、『ねこ』
これらを組み合わせて『重力に逆らうねこ』になりました。ねこはねこです。
まさかの事実が判明しました
8月の直前、先ほど「その時は問題なかった」と言ったのですが案の定僕担当の機体だけでなく副リーダーが担当する機体も不調が起き、結果的に2人はキャチロボのことを一切することなく8月に突入していました。レスコンまであと数日という時です。
僕1人新機体を考えさせられ、全て1人で担当し、精神すり減らしていた中部員にブチギレてしまい、副リーダーにだけ居場所を教えて部室に籠っていた日がありました。
(学生プロジェクトには大工大生おなじみ「ANNEX」という活動施設の他に他部活動と同じく部室が与えられている他、ロボットプロジェクトはあんまいうとアレなのでぼかしますが学内のどこかの倉庫1室を借りています。部室と倉庫は僕の代では物置としていました。)
その日、新機体はもう製作続行できないと他部員と揉めたのもあって(今思えばここで新機体をやめて、完成していた担当機体用の足回りを固定化するのに注力していればレスコンはうまくいったのかも。。。と思っています。めちゃくちゃ反省。)どうすればよかったのかと自戒してました。
しかし僕は大変単純なので、ひとりは寂しく、とりあえずロボプロのことを考えるのはやめようと思いました。
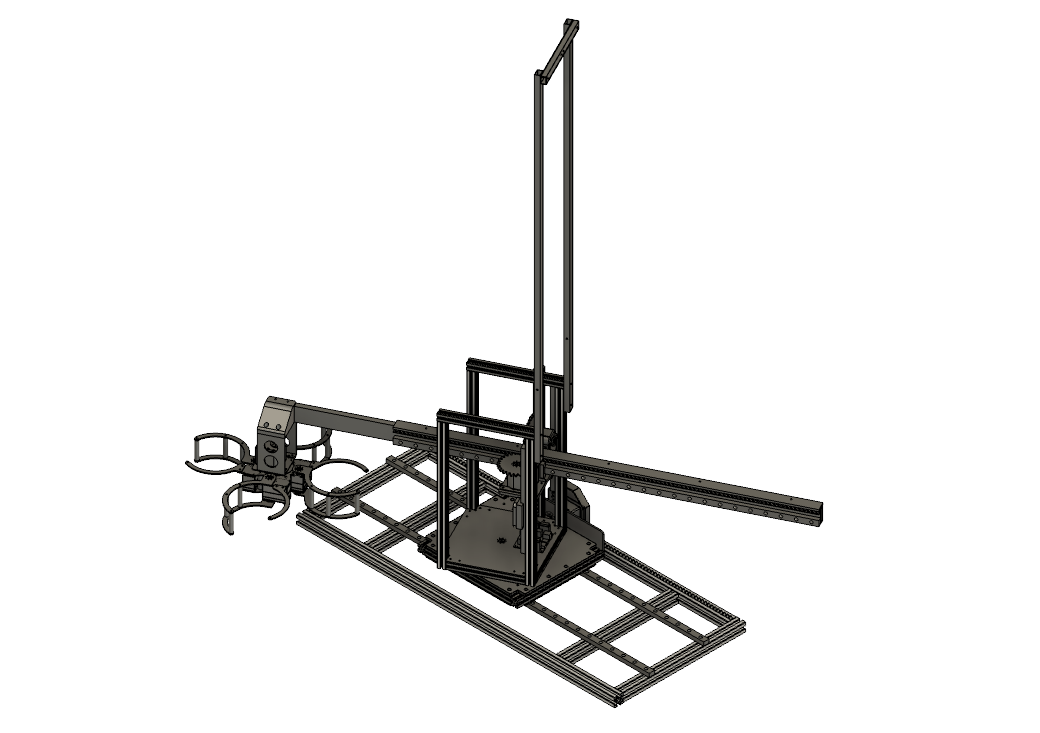
そこでFusionを開き、一人で好きなの作ってみようと作業を始めました。その時の奴がこれです。

当時の僕はは2つ同時取りを考えており、この設計自体は30分で適当にやってみたらできた、というものだったと思います。掴めばええんやろ掴めば。と思っていました。
先端の素材自体はアクリルを考えていました。円筒部分は3Dプリンターでできるやろうと。しかし僕は設計担当ではないので、あくまでこれは遊びのつもりでした。
中途半端ですが、ここまでがキャチロボ出場までの経緯になります。なんかあんま身のある話になりませんでしたね。まあおもろいのは多分ここからです。
本項目のオチとしては、結果的にチームがまとまらず、レスキューロボコンはセカンド敗退という結果でした。まあそりゃそうだろうな、と今なら思えますが当時はどうにもならなかったことが多くどうしようもなく悔しすぎて精神的に完堕ちしてました。ロボコンやるんならさ〜毎日活動に来よ?まあ今言っても仕方ないですが。人数が多ければみんなで分担もできるんでしょうが下級生と上級生の信頼関係も築けておらず、同級生は8人しかいないのに実働は4人、みんながみんな自分のことしか考えられない状況ではまあものづくりは難しいですよね。
2.キャチロボ1ヶ月チャレンジの経緯
ここから話をするのは、1ヶ月チャレンジの経緯です。単純に、レスコンが終わってすぐの話です。
副リーダー...もとい相方と現状の再確認。2人ともキャチロボのことをやっておらず、絶体絶命です。相方に設計状況を確認すると完全には終わっていない、問題点が解決できていないとのこと。僕は前にブチギレながら作ったあのプロトタイプ(?)くらいしかありません。
ちょうど大会まで1ヶ月。2人で「計画立てよ!!!!」と話をして、なんとか身内だけでこの意識が溶けないようにTwitterで呟いたのが始まりです。
結果的にこの時に、僕のプロトタイプを採用して設計を進めようとなりました。ここで、僕がメイン設計者となりました。
そして相方は、キャチロボのための活動費を稼ぐために、親の仕事を手伝いに数日遠くに行ってしまうのでした...。
3.キャチロボ1ヶ月チャレンジの詳細
前提として、僕は9月初旬から大会当日まで、インターンシップに行っていました。そのため、この期間は一切僕は活動ができませんでした。8月下旬に相方がいない分、9月は相方が機体の面倒を見てくれていました。
2人で活動できた日は、1ヶ月のうちほんの10日間くらいなのではないか?と思います。
この2人のスケジュールの合わなさに、ロボプロでお世話になっていた某SF先生から
「お手伝いを頼むのはどう!?」という提案をいただきました。さすがに2人では無理だから、ということです。僕はいいんですか!?と恩恵に預かることに。先生の紹介で他の学生を紹介してもらいました。これがよくなかったんですがこの記事で書くとなんか命危なそうなので省略します。
相方がいない合間に設計が進み、帰ってきてから加工や組み立て、僕がインターンに行ってから制御、ざっくり言えばこんなサイクルでロボット製作が進みました。
8月19日:キャチロボ1ヶ月チャレンジ 開始
8月20日:先生からお手伝い紹介+ロボプロ同期を巻き込むことに成功
8月22日-9月3日:基本設計完了→加工開始→組み立て完了まで
9月4日-9月10日:基本制御完了?(あまりこの時期関わっていないのでわからない)
9月11日-9月16日:最終調整
ざっくり、こんなスケジュールだったはずです。大会を見てくれた、動画を見た人ならわかるかもですが「他チームと比べ機体が小さい」「シンプル機構」なので、こういった特徴もあって、加工自体は割と早く終わらせることができました。僕がインターンに行く9月5日の前日に機体が制御できる状態(配線なども終わらせた状態、先生からお薦めされた2足歩行ロボットに使われているマイコン基盤を取り入れたことでさらに制御にかける期間も短縮できたのではないかと思います。)まで持っていって、僕は静かにインターンに旅立ちました。
4.キャチロボ機体紹介
きんちょうでなきそう pic.twitter.com/tImZME2CyY
— あるみめんべい (@Alumi_menbei) 2022年9月18日
X、Y、Z軸、そしてヨー軸方向に可動域を持つ機体を設計しました。先端はプロトタイプから変わって4つ同時掴みを実現させました。

この先端部分を構成している板金はこんな感じになっています。
先端部分はこんな感じの板金で、4つのサーボ(KRS2500系)を取り付け、真ん中軸にはKRS4000系を取り付けて回転、掴みを行っていました!
— あるみめんべい (@Alumi_menbei) 2022年9月24日
こいつはおうちでコースターとして利用します!#キャチロボ#重力ねこの反省会 pic.twitter.com/K0ueBTvmFW
今ではこいつがどこに行ったのか皆目見当もつきませんが、この板金は大宮モノラボにある「MDX-540」またはマシニングセンタを用いて切削しています。何度かマシニングセンタで切削し穴位置が正しいかどうかを確認したのち、MDXで他の人に切削してもらいました。
大型マシニングセンタの利点は、この1枚を切削するのに大体2時間-3時間という時間で済むところです。途中でエンドミルの取り替えがあるので手間ではありますが、その日中に手元に来るので、試作に便利だし、設定をいじる、または諸々を工夫することでMDX540と同様のキレイな部品を得ることができます。大型マシニングセンタのデメリット?は片付けが死ぬほどだるいのと削り跡がめちゃくちゃ汚い場合があることです。またはエンドミルが折れまくること、部品が吹っ飛ぶ可能性があることです。
- 片付け死ぬほどだるい
- 削り跡汚い、バリが多い
- エンドミル折れる問題
- 部品吹っ飛ぶ
1に関しては人が多ければ問題がないですね、、。
2は切削速度を早めること、できればFusion360の設定に「タブ?付き」というのがあるのですが、、それは使用しない方が後始末は楽ではないかと思います。タブは加工時に一部だけ薄皮残して切削を終わってくれます。この薄皮をペンチなどでぱちんと切るだけで板金から取り外すことができます。これは4の事象が起こらないようにしてくれるもので、複数部品を加工している時、その一つが削り切れた後に高速回転に巻き込まれ吹っ飛ぶと言ったことが起こらなくなります。部品精度がどれだけ求められるかなどでタブの有無を決めるといいと思います。タブをつけたらつけたで、ヤスリなどで削って仕上げしておかないと怪我の原因にもなるので...。
3なんですが、切削条件と加工対象物の特殊さで折れやすさも変わるように感じました。単調な部品を出力するだけであれば安心で、多少変な形(ツイートの板金のような)であっても折れることはそうそうないですが、早く完成させようと思って回転速度を早めたり、1度に大量の部品を出力しようとして途中で疲労で折れていたり、ヒューマンエラーで設定を誤っていたり(モノラボには現在3台の大型マシニングセンタが置いてあり、そのどれもが最大回転速度が異なるものです。それぞれに事前にFusionに読ませておくデータもあるし、切削データ作成時にFusion側から大体エラーが吐かれるので大抵の問題は事前に回避できます。しかし、Z軸スタート位置だけは何度も確認しておかないと事故につながります。)弊部で一番金が飛んだかもしれないですね。エンドミル、、。
機体はマジで近藤サーボで構成された金で時間を買ったものです。某先生からのお薦めもありましたし、、おかげで1ヶ月で完成できましたし、何よりサーボだと2足歩行ロボットのマイコンが使用できるので、一気に制御が楽になります。2足歩行ロボットをよく知る方ならわかると思うのですが、本当に感覚的に制御でき、長々と言語を書く必要もないので今回本当に助かりました。教えてくれてありがとうございます。
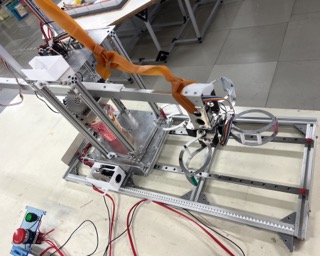
なんか急に画質が粗くなってしまったんですが、これに映っている白い部品は全て3Dプリンター製です。本当です。
この機体の難点はヨー軸回転の部分です。1点のみ(動力源)でしか支えられておらず、故にこの1点にアーム等の荷重がかかるため、大変壊れやすくなっています。今回短期決戦だったことでサーボ1つが犠牲に(でもこれ大概やで)なりました。いや、1つで済みました。多分操縦練習をがっつりしていたら余計壊れていたかもしれません。
このゴム部分は前につんのめってしまうアームをなんとか水平(?)に保つために引っ張り上げているというものです。なんかこれが大会当日めちゃくちゃウケたんだよな、なんで?
アクリル製を想定していた先端アームは、お手伝いの方々がレーザー加工できない(知らない)ということでアルミになりました。今思えばどちらでもいいなと思うのですが当時の私はなぜレーザー加工ごときできてくれないのかと尖っていました。よくないですね。
なんとなく話してためになりそうなことは、大体これくらい?ですかね。身の上話するとどこぞに捕まるので怖いです。本当はそっちが一番面白い?んですが...。
5.まとめ 僕が本当に思ったこと
少人数でロボットを作ることは、
「長期休みで授業がない」
「集まったメンバー全員にやる気がある」
「ロボコン以外の予定を立てない」
が揃えばいけると思います。つまり人間ではありません。
少人数でやると当然資金が問題なんですが、今回高いモータは全てモノラボから借りました。さらには某SF先生に部品の援助もしていただきました。(アルムフレーム、板金、スライドレールなど)
これはロボプロ時代の関係性があったからこそ、と思っているので普通はできないことだと思います。本当に感謝しています。先生からの支援がなければ普通に死んでました。
ロボット運搬もモノラボの先生方にご協力をいただきました。クソみたい....いやしんどかったロボプロでの2年間でしたが、その2年間で得た人間関係が今回のキャチロボで多方面から助けを得ることができた要因にもなり、なんとも言えない気持ちになります。
2人だけで、というのは色々と無理なものは無理なところがあって、今回お手伝いに入ってくれた皆様と人間関係を構築しようにもあまりにも短期的、かつ情報共有がまともにできておらず、今回チーム名の由来も本記事が初公開です。相方が知らんかったのは驚きですが。
結果としてベスト8入りとなりましたが、次は絶対優勝します。
ですが、キャチロボ事務局の皆様。できればデザイン賞やアイデア賞などの賞の種類を増やしていただけるとちょっと嬉しいです!
短いですが、とりあえず本記事はこれでおしまいです。キャチロボについてはいつでもDMなりなんなりで聞いてくださればお答えできます。
大工大の皆様、ロボット系部活動やサークル、プロジェクト、もし気になったらぜひ入部してください。2年生からの入部もロボットプロジェクトでは大歓迎です。勝手に宣伝しておきます。ふふふ。
あと、本当に今回色々ありすぎたので次2023年は相方と二人だけで最高のロボット作ってみせます。キャチロボチャレンジはまだまだ続く。
P.S じゃがりこは先生(もしかしたらお子さんが食べてらっしゃるかも)と相方と僕で美味しくいただきました。来年のお菓子は何かな。
.....あ!ついでに!!!!!
私あるみめんべい、この度「関西ロボコン連合チーム」を設立準備中です!
【関西から世界に!RoboMasterに挑戦しませんか!?】
— あるみめんべい (@Alumi_menbei) 2022年11月28日
以前ツイートしていた関西圏ロボマスチームの立ち上げメンバー募集です!!
RoboMasterだけでなく他ロボコンに出たい人にも入って欲しいです!
下記のFormsから申込可能です!
【https://t.co/rAOgjFVlXn】 pic.twitter.com/gHwkoRyZ0W
関西圏の各大学・専門学校・高専・高校生を対象とした連合チームです。
主に「RoboMaster」という大会に出場予定です。その「RoboMaster」に出場するには結構課題をクリアしないといけなくて...その一つが『組織』です。
「RoboMaster」と検索していただくと、開催国である中国のチームはもちろん、日本の出場チームのロボットも見ることができます。
本チームはそれ以外にも、他ロボットコンテストへの参加支援を行う体制を整える予定です。
ロボコンに挑戦したいという人が、「環境」「機運」で挑戦の機会を奪われることのないように
その思いで、新チーム立ち上げに着手しました。
ロボットを作るだけではなく、他企業様とのスポンサー契約や、ロゴデザイン、チームウェアデザインといった運営業務もあります。こういった取り組みに賛同していただける&自分の得意なことを生かして何かを成し遂げてみたい!在学中に他の人が体験したことないようなことに挑戦したい!という人は、ぜひチーム立ち上げメンバーに参加してください!
それでは、、、、!!!!